MCS控制夾爪
- 本範例將實做MCS雲端控制夾爪, 整個控制系統的概念其實很直觀, 首先我們先在MCS雲端網站上增設一個資料通道, 並設定為開關,當我們再網站上撥動開關時, 就會透過網路傳送開關狀態給7688, 而7688則在接受到訊號後,做出相對應的馬達動作。 以下分成三個步驟帶您一步一步完成設定:
PART I: MCS雲端網站設定
首先我們先登入我們的雲端MediTek Cloud Sandbox
點選登入,進到console端裡面

建立開發原形
進入開發,新建立一個開發原型
編輯原型

進入原型
按鈕控制資料通道
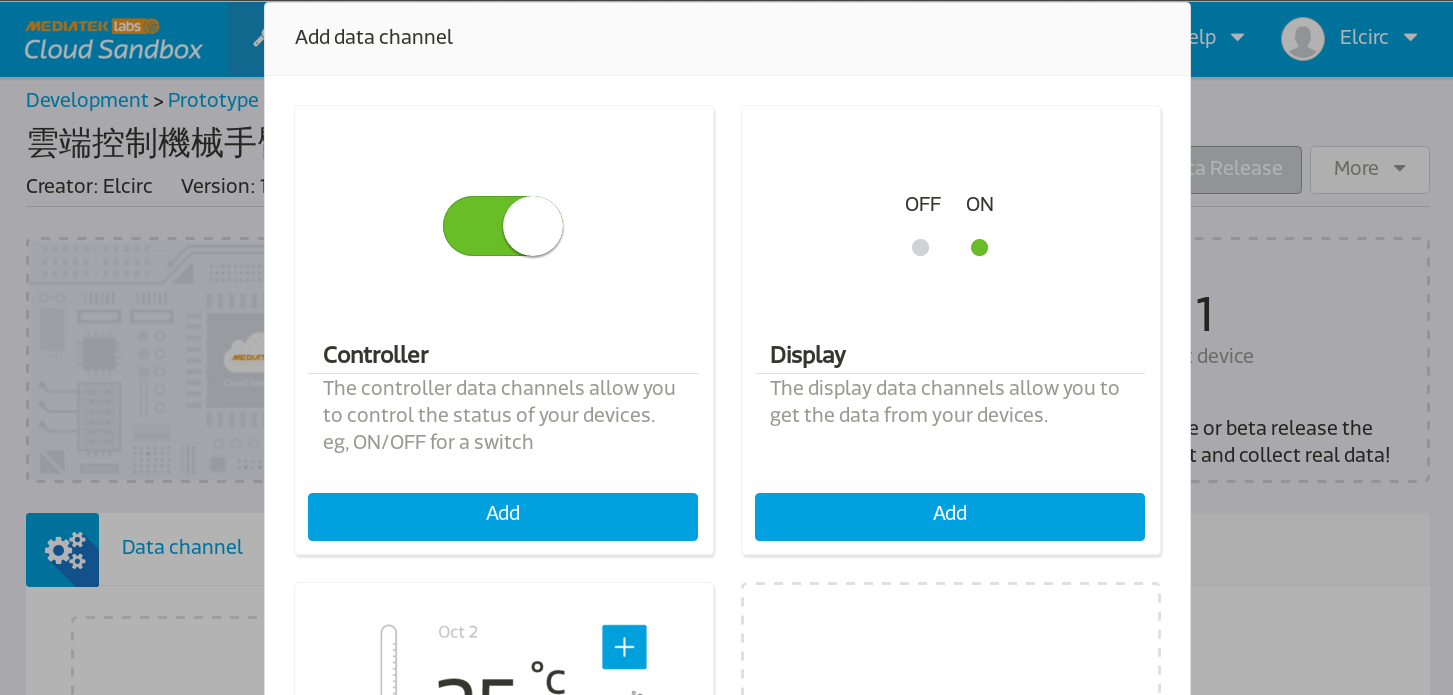
新增資料通道
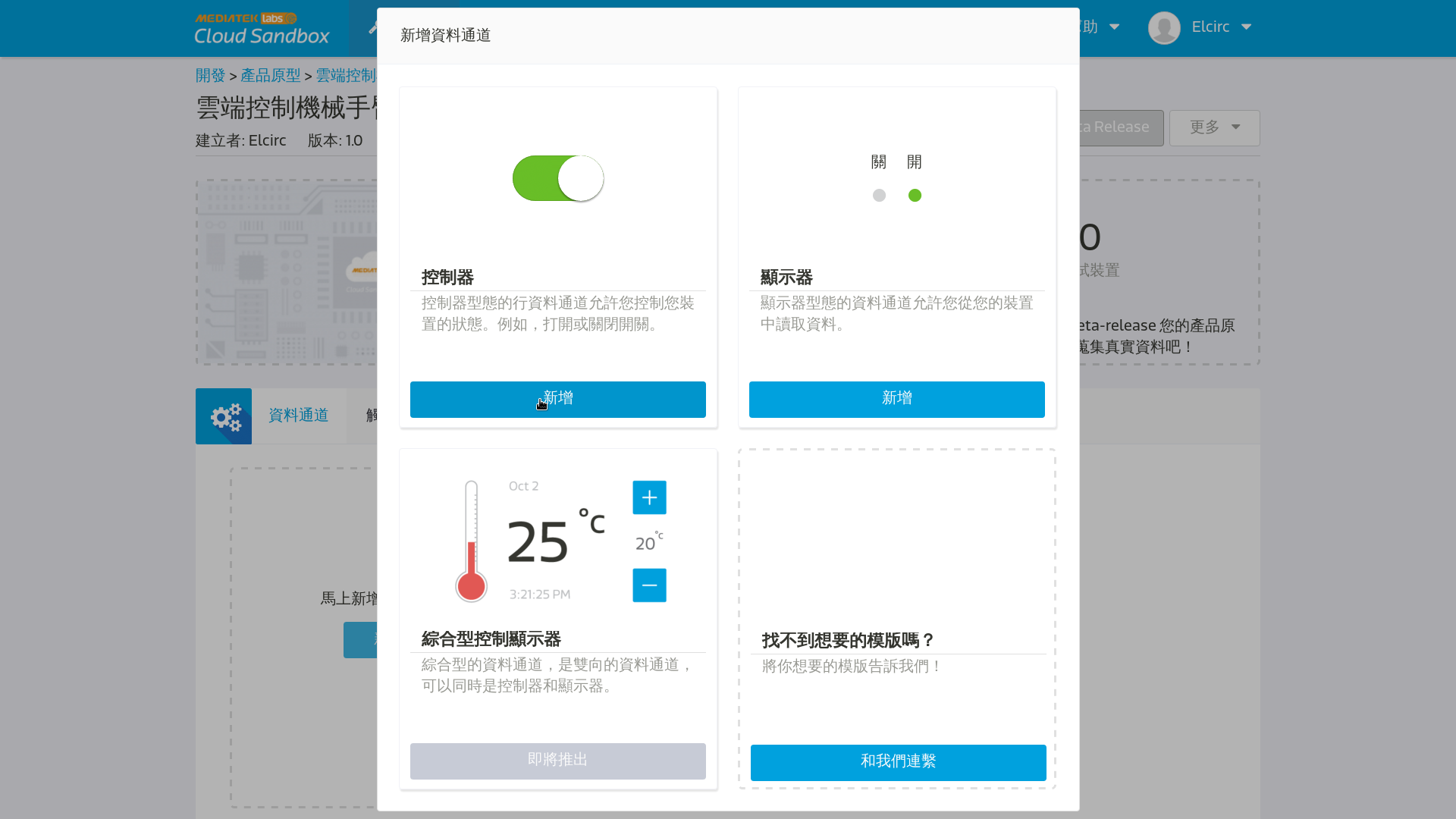
新增控制器,選擇按鈕控制器,這裡再提醒一次, 資料通道名稱是給雲端網站代表資料通道用的, 而資料通道Id是給機器辨識用的,所以要用英文。
完成後點選測試裝置,並新增一個測試裝置

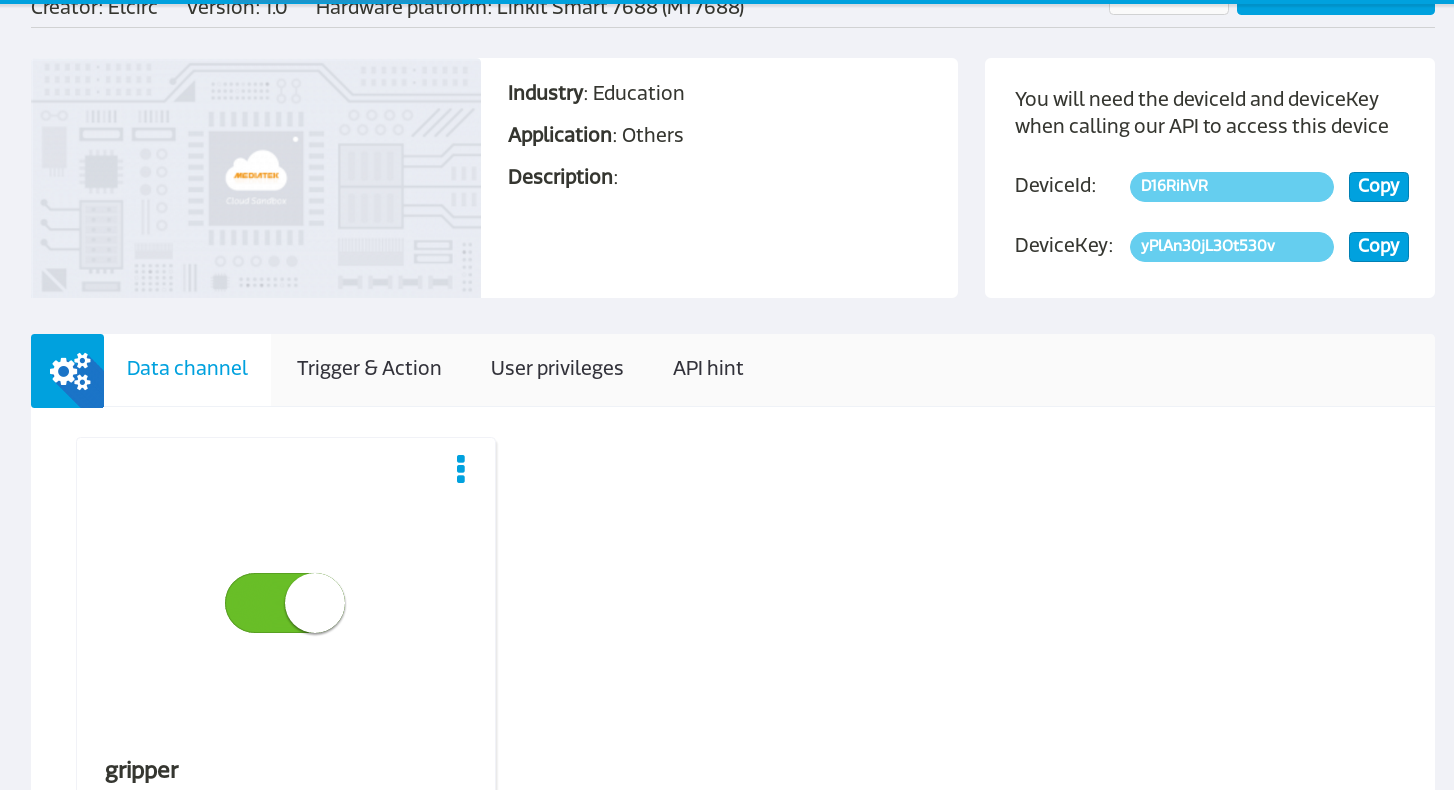
- 右上角的DeviceId跟DeviceKey非常重要, 他們扮演的角色就是待會7688要跟MCS雲端溝通的通行證。

- PART II: 請打開您的Arduino IDE下載以下程式碼到7688中, 執行手臂夾爪的控制程式。
mcs_gripper.ino
#include <Servo.h>
Servo s;
void setup()
{
Serial1.begin(57600); //建立Arduino ATMega32U4與MT7688AN之間的連結
s.attach(3); //將伺服馬達的腳位指定給3號腳位
}
void loop()
{
if(Serial1.available())
{
int command = Serial1.read(); //讀取MT7688AN送來的指令
if(command == 'o') //如果是o的話,就打開夾爪
s.write(160);
else if(command == 'f') //如果是f的話,就合起夾爪
s.write(30);
}
}
PART III: 接下來請登入7688,下載requests函式庫, 完成後請在7688上執行以下的程式碼, 接收雲端網站的控制訊號。
下載Python網路溝通用的函式庫:requests, 請在console輸入pip install requests。

執行以下手臂夾爪測試程式碼,請輸入:python mcs_gripper.py
import requests
import serial
s = serial.Serial("/dev/ttyS0", 57600)
device_id = "DZF34Y80" # 改成您的device id
device_key = "B0df4jYfaxQ0BwK9" # 改成您的device key
data_channel = "gripper" # 改成您的data channel id
url = "http://api.mediatek.com/mcs/v2/devices/" + device_id
url += "/datachannels/" + data_channel + "/datapoints.csv"
while True:
r = requests.get(url, headers = {"deviceKey" : device_key}) # 讀取MCS上夾爪控制開關的訊號
print r.content
data = r.content.split(",")[2]
if data == "1": # 如果從MCS收到1,代表要開夾爪
s.write("o")
else if data == "0": # 如果從MCS收到0,代表要閉夾爪
s.write("f")
- 是不是能夠在MCS網站上透過按鈕來開關機械手臂上的夾爪了呢? 接下來我們將進到下一個階段,開始控制機械手臂的旋轉與伸縮。