雲端控制機械手臂
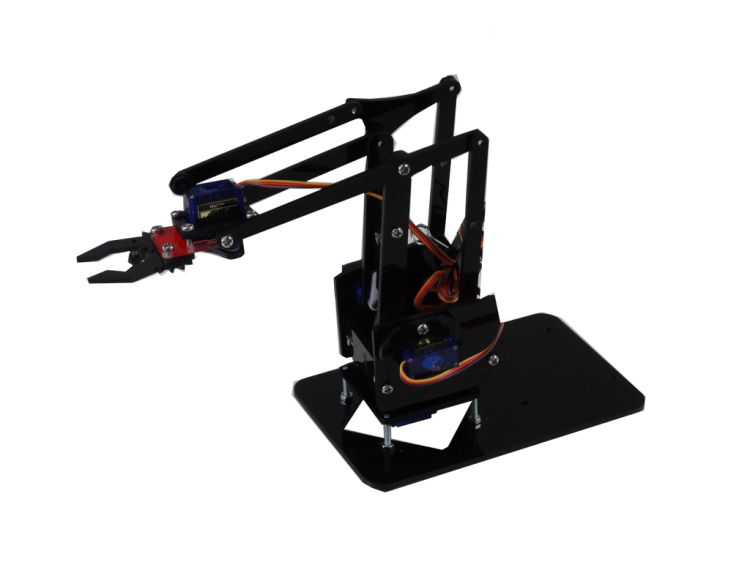
本章將帶您一探機械手臂的世界, 並介紹基本的伺服馬達控制及原理, 關於機械手臂的部份, 您可以自行設計自己的機械手臂, 或者是參考網路上許多免費資源來製作, 本範例將使用的是一款開源機械手臂meArm。
程式語言的部份主要使用的是Python + Arduino, 如果您喜歡使用其他的語言, 例如:Node.js + Arduino, 也請參考本章末的附錄, 裡面將會有詳細的解說。
另外在此提醒一下, 本書主要的對象是7688 duo板, 7688有沒有Duo主要差在硬體的腳位, 有Duo的版本主要是透過arduino的ATmega32U4來控制, 而一般沒有Duo的7688則是必須走gpio腳位來控制, 尤其兩者的PWM腳位(用來控制伺服馬達)不同, 以下如果沒有特別聲明, 7688皆是指7688 Duo, 如果您真的很想用7688(非Duo版本)來控制機械手臂, 請別擔心我們也有收錄相關教學, 請直接跳到本章末的7688控制機械手臂。